

Cet été, je me suis amusé à transformer mon 1er quad 5″ (présenté ICI) en un 7″ typé LR ( Long Range).
Plusieurs raison à ce passage en 7″:
– La 1ere raison est que je ne volais plus du tout avec ce quad en analogique, depuis que je m’étais monté un JeNo en Walksnail l’été dernier. Pas plus même après l’avoir passé en numérique… Le JeNo vole nettement mieux!
– J’ai tenté de m’initier au LR avec mon JeNo 5″ en lui collant une Li-Ion 6s 4000mAh sur le dos… mais avec le poids de cette batterie et de ma gopro9, j’avais des battery sag de ouf, le quad n’avait plus rien dans le sac… Et l’autonomie pas ouf.
– Il existe des bras 7″, vendu seuls, pour la frame Source One V5. J’ai pensé que c’etait une bonne option, plutôt que de partir de zéro et pour limiter les frais… ce n’est pas donné une bonne frame 7″!
Démontage
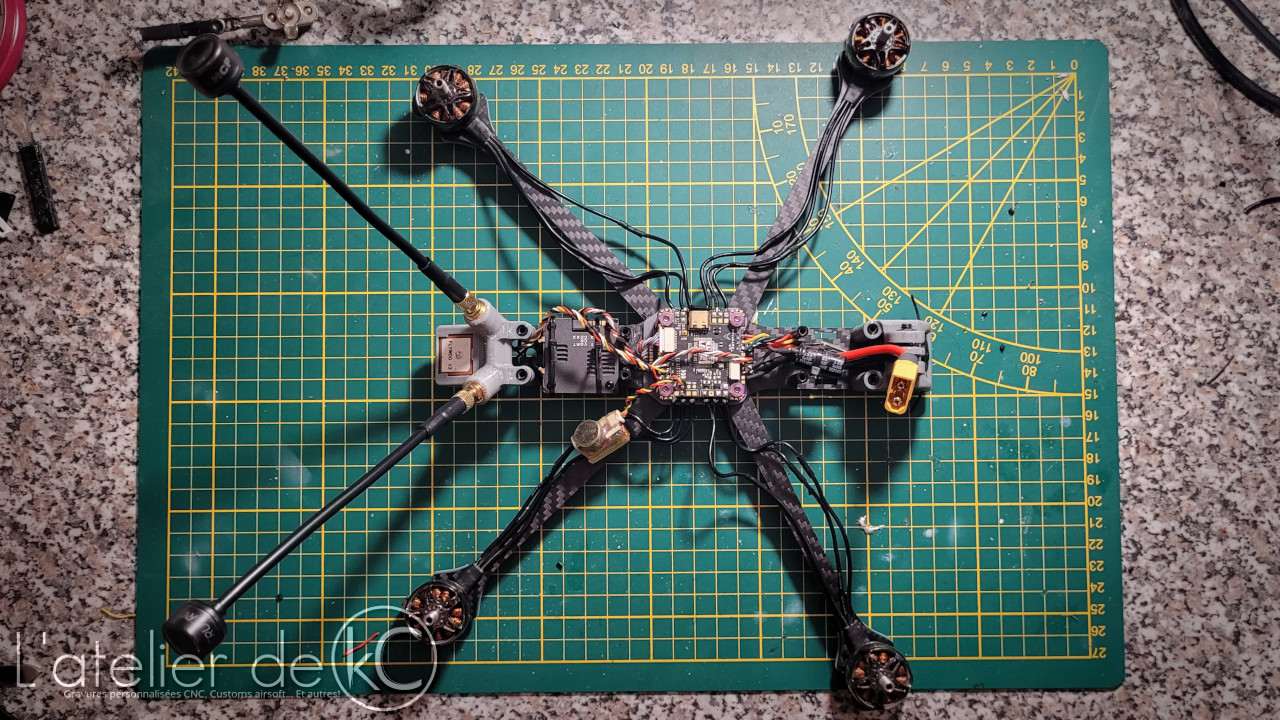
Voici tout d’abord le drone avant transformation:
On garde quoi?
Je vais donc conserver la frame (en changeant juste les bras), la stack Skystar F7 + Esc BHeli 32 60A, le récepteur ELRS happymodel EP1, le buzzer autonome, et le VTX walksnail.
Mon JeNo 5″ a également servi de donneur d’organe: Je lui ai piqué son GPS, au final pas très utile sur 5″, surtout une fois le 7″ monté pour voler loin!
Du coup, il manque quoi?
Me reste donc à acheter: Les bras 7 pouces, des antennes plus longues, moteurs et hélices!


Montage
Comparatif…
La différence entre les bras et hélices 5 et 7 pouces est flagrante!


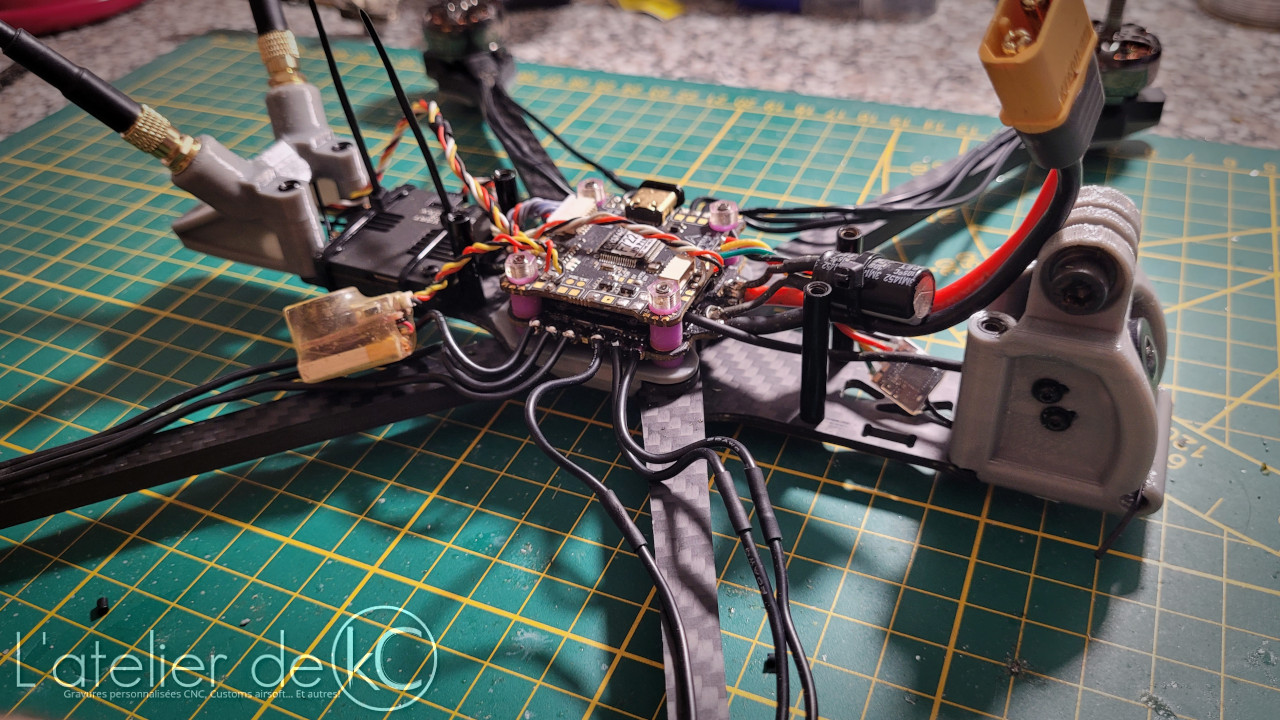
On sort les outils & fer à souder
On change les bras, et on réinstalle les composants. J’en ai profité pour tourner l’ESC de 180°, afin de passer le câble en XT60 et le condensateur vers l’avant.
J’ai dans un premier temps essayé de voler avec des moteurs 2305 (Emax EcoII) et 2207 (Tmotor Velox), en 1950kV que j’avais sous la main. Ça vole… mais c’est clairement pas optimal. Je pesais que petit moteurs= quad plus efficient, mais ce n’est pas le cas. C’est peut être vrai avec de petits moteurs et un kV plus faible… Mais là le quad décolle à même pas 10% des gaz et on sent qu’on n’est pas dans une plage d’utilisation optimale: la conso est assez élevé et l’autonomie n’est pas au rendez-vous.
J’ai donc opté pour des moteurs plus adaptés: des SmooX 2806.5 1350kV de chez rcINpower. Dans la même tranche de prix, j’ai vraiment hésité avec des Tmotor F90, car je kiffe les F40 sur mon JeNo. J’ai finalement opté pour les rcInpower… Car je les trouve plus joli ^^’
Avec ces moteurs, l’autonomie monte facilement à 12 minutes avec la Li-ion 6S de 4000mAh, avec de la réserve! Le comportement du quad est beaucoup plus sain, le decollage/ vol stationnaire se fait à ~25% des gaz, comme mon 5″.



Impressions 3D
J’ai conçu quelques TPU pour rendre cette frame source One V5 plus adapté au LR:
– Une cage caméra allongé qui permet d’avancer la caméra, pour ne plus avoir les hélices dans le champ de vision, mais aussi de dégager plus de place sur la top plate pour y loger de grosses batteries. La cage intègre aussi un montage gopro et un logement pour l’antenne RX. Téléchargeable ICI
– Un backpack pour loger le GPS et les antennes VTX (en connecteur SMA), toujours dans l’idée de dégager et « d’allonger » au maximum la top plate. Téléchargeable ICI
– Une gopro case pour amortir au maximum la gopro… car subsistent malheureusement pas mal de vibrations…


TUNE
(FC en betafight 4.5.1)
1er jet
Beaucoup de vibrations lors des premiers vols d’essai… j’avais lu sur le web que les config’ 7″ étaient sensible à ce niveau, et c’est malheureusement le cas ici. Même après tune et softmount des moteurs, j’ai des vibrations plus ou moins rapide dans le retour vidéo. Heureusement cela n’est plus visible dans les enregistrement gopro une fois les plans stabilisés à l’aide de Gyroflow!
Et je me demande si mon gyro ne commence pas à déconner, j’ai de temps en temps des sortes de dérives sur le yaw, toujours vers la gauche… Il faut que je teste une autre FC.
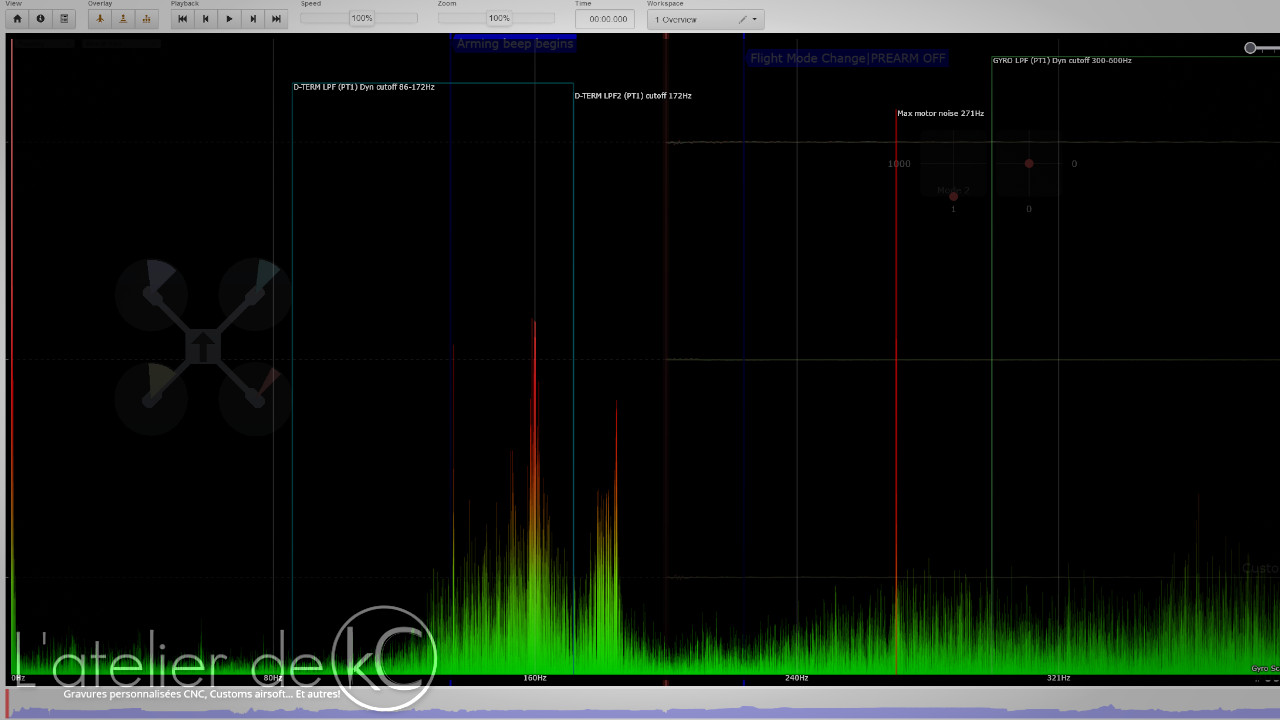
Après analyse de quelques blackbox, je n’ai pas pu pousser le curseur filtre gyro au delà de 1.2, 1.15 pour le filtre D-term.
Niveau curseurs PID:
D gain: 1.3
Gain P&I: 1.25
Gain FF: 0.85
Dmax: 0
Gains I: 1
Pitch/roll D : 1
Pich:Roll P, I &FF: 1
Multiplicateur: 1.15
2e jet
Après avoir posté mon build sur le forum We Are FPV, on m’a donné plusieurs conseils pour affiner mon réglage et mon montage:
- Déjà, ne pas trop me fier à la blackbox sur le Yaw, plutôt regarder le Pitch et le Roll.
- Avoir des vols plus agressifs et plus homogènes pour comparer les backbox: là je vole trop doux, et sans exploiter la réserve de puissance du quad.
- Baisser le gain I à 0.6~0.8.
- Tester d’autres hélices, notamment avec un pas moins élevé.
- Voir carrément de changer de frame: les 5″ transformé en 7″ sont quasiment toujours sujet à vibrations plus ou moins prononcés.
Pour les hélices, je n’ai effectivement testé que des tripales 7050 et des 7042 bipales. Les bipales c’est spécial, je suis pas fan… faut que je me fasse mon expérience, que je teste des configs différentes, et je pense effectivement passer sur une autre frame lorsque j’aurais affiné mes choix!
Et effectivement, la blackbox est beaucoup plus propre en appliquant ces différents conseils!
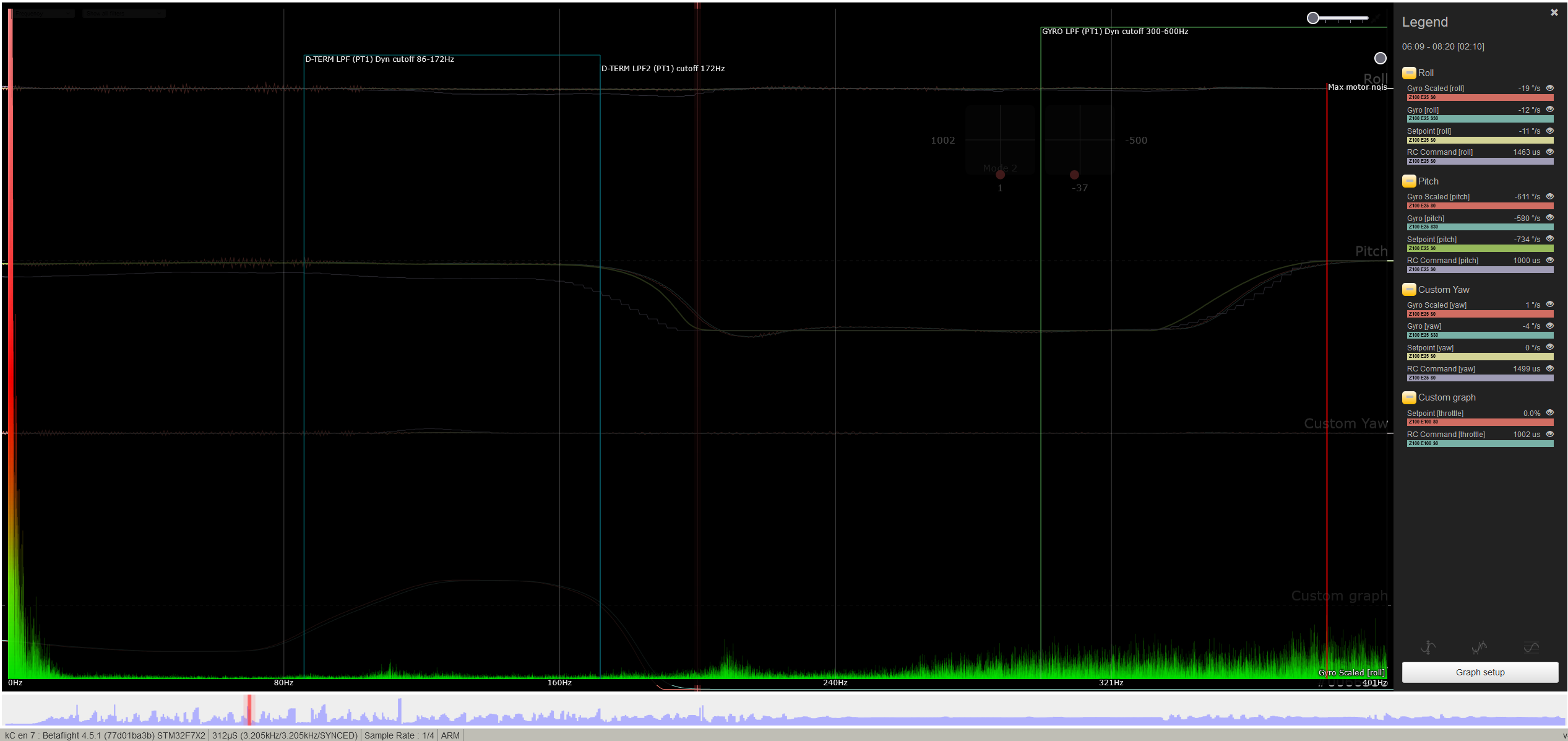
Suite à cela, j’ai finalement pu pousser le curseur filtre gyro à 1.25, et à 1.20 pour le filtre D-term.
Et concernant les PID:
D gain: 1.35
Gain P&I: 1.3
Gain FF: 0.8
Dmax: 0
Gains I: 0.75
Pitch/roll D : 1
Pich:Roll P, I &FF: 1
Multiplicateur: 1.15
Et en vol?
Voici 2 vidéos, extraites du même vol:
- La première est extraite du DVR (Digital Video Recorder), c’est à dire qu’il s’agit d’un enregistrement de ce que je vois en direct dans mes lunettes pendant le vol, sans correction:
- L’autre vient de l’enregistrement de la Gopro 9, après stabilisation et colorimétrie. La vidéo était malheureusement très surexposé lors de la capture, je n’ai pas pu récupérer de détails dans le ciel en post-prod… C’est en faisant des erreurs qu’on apprend!
Le drone est plutôt sain au final… Quel pied de voler aussi longtemps et aussi « loin »! (Selon la législation il faut rester en mesure de conserver le drone en vue)
-kC-

